Техническое извещение 15
Необитаемые подводные аппараты (НПА) используются для решения широкого круга задач как гражданского, так и военного назначения. Применение различного рода НПА (автономных, телеуправляемых или буксируемых) позволяет проводить различные научные (геологические, биологические, океанографические, геофизические, геохимические, акустические, оптические) исследования, а также аварийно-спасательные, подводно-технические работы и работы военного назначения.
В данной статье рассматривается применение телеуправляемых необитаемых подводных аппаратов (ТНПА).
Мы благодарим автора — Шилина Михаила Михайловича, кандидата технических наук, доцента кафедры морских информационных систем и технологий ФГБОУ ВО «Санкт-Петербургский государственный морской технический университет» за предоставленный материал.
1. Классическая схема управления работой ТНПА по проводному каналу связи
В настоящее время типовая схема управления телеуправляемыми необитаемыми подводными аппаратами предполагает использование комплекса управления, включающего в себя размещаемую на судне-носителе систему удалённого управления, кабельную систему обмена данными, включающую в себя катушку носителя с кабелем и размещаемую на ТНПА аппаратную катушку с кабелем, а также бортовой блок телеуправления. В процессе работы ТНПА «привязан» к судну-носителю кабелем, по которому в реальном масштабе времени поддерживается связь. По кабелю передаются данные от гидроакустических, магнитометрических и оптических (видео- или фотокамеры) средств обнаружения, а также управляющие команды. Обычно в процессе работы максимальное удаление ТНПА от судна-носителя составляет сотни метров, при этом рабочая глубина аппарата может достигать нескольких километров.
Вариант организации управления работой ТНПА с использованием кабеля представлен на Рис. 1. [1].
Характер выполняемых ТНПА работ по одному из основных предназначений — поиску и обследованию затонувших объектов — предполагает действия в заранее определённой зоне. В случае, когда точные данные о нахождении заданного объекта неизвестны, размеры зоны поиска оказываются значительными, а время для её обследования с помощью одного аппарата недопустимо продолжительным. При использовании существующей схемы судно-носитель не может удалиться от ТНПА на расстояние, превышающее длину кабеля телеуправления, а одновременное использование нескольких ТНПА для повышения производительности выполняемых работ затруднено из-за высокой вероятности запутывания кабелей телеуправления.
Вариант организации управления работой ТНПА с использованием кабеля
2. Модифицированная схема управления работой ТНПА по комбинированному каналу связи
Исключить вышеупомянутые ограничения позволяет внедрение радиоканала обмена данными. Например, в настоящее время такую схему реализовал Концерн «НПО «Аврора» [2] в своём автономном НПА с использованием широкополосного канала обмена данными диапазона сверхвысоких частот (СВЧ) стандарта IEEE 802.11 (WiFi), при нахождении НПА в надводном положении. В соответствии с данным стандартом, гарантированная дальность обмена данными в таком канале на открытой местности составляет порядка 150 метров. По заявлению разработчиков, за счёт использования дополнительных настроек удаётся увеличить дальность работы до 1200 метров, но при этом надёжность работы радиоканала на дальности, близкой к предельной, оказывается невысокой.
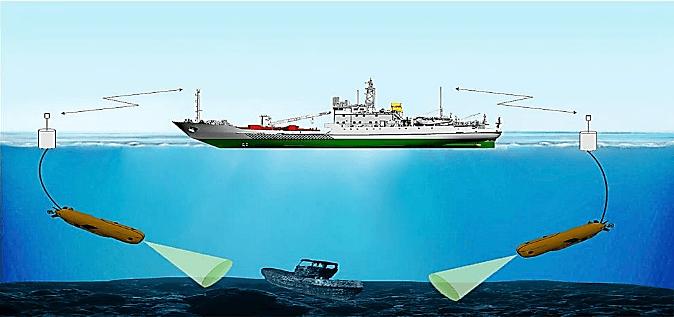
Принципиального увеличения дальности надёжной связи с подводным аппаратом удаётся достичь за счёт использовании радиомодемов УКВ диапазона. При этом предполагается использовать следующую схему: интегрированный с ТНПА связной буй-ретранслятор всплывает на поверхность воды после погружения ТНПА по команде бортового контроллера. Оставаясь на поверхности воды, он обеспечивает связь с системой удалённого управления, расположенной на судне-носителе по радиоканалу (радиосети), и с аппаратным блоком телеуправления ТНПА через кабельную линию.
Вариант организации управления работой ТНПА с использованием радиоканала представлен на Рис. 2.
Вариант организации управления работой ТНПА с использованием радиоканала
Антенна буя-ретранслятора является гибкой, что позволяет компактно размещать её в скрученном состоянии внутри буя-ретранслятора. Раскрытие антенны производится автоматически после всплытия буя на поверхность воды перед началом эксплуатации ТНПА.
На первом этапе для организации радиоканала применяется радиомодем Guardian-100 фирмы CalAmp [3]. Внешний вид радиомодема представлен на Рис. 3.
Радиомодем Guardian-100
Данный радиомодем работает в диапазоне частот 136-174 МГц, имеет симплексный, полудуплексный и дуплексный режимы, обеспечивая скорость передачи данных до 19,2 кбит/с.
Выбор данного модема для решения стоящей задачи был сделан с учётом существующих возможностей системы управления ТНПА и применяемых последовательных интерфейсов. При этом скорость обмена данными в технологической радиосети позволяет надёжно доводить управляющие команды на борт ТНПА и принимать от последнего информацию с размещённых на нём средств обнаружения различных типов (кроме видеокамер).
Применение интегрированного в систему управления ТНПА буя-ретранслятора, наряду с расширением возможностей по обмену данными между ТНПА и судном-носителем, позволяет упростить и повысить точность навигации за счёт использования данных от средств глобальной навигационной спутниковой системы (GNSS)1, размещаемых внутри буя и способных принимать сигналы на постоянной основе, либо сеансами, в зависимости от выполняемой задачи [5].
Одновременное использование нескольких ТНПА может обеспечиваться средствами технологической радиосети обмена данными, реализованной на описанном выше оборудовании. Учитывая пропускную способность радиосети на радиомодемах Guardian при работе на номинальную дальность 12 км, после модернизации управляющего программного обеспечения, допускается одновременное применение нескольких ТНПА. Это обеспечит следующие преимущества при выполнении основных задач оперативного предназначения:
свободу перемещения судна-носителя вследствие отсутствия прямой жёсткой связи с ТНПА через кабель;
расширение зоны действия ТНПА;
одновременное решение задач оперативного предназначения в нескольких зонах;
сокращение необходимого наряда судов для выполнения поставленной задачи;
отсутствие привязки оператора телеуправления к бортовой системе телеуправления [1].
3. Результаты натурных испытаний радиоканала
Номинальная дальность канала связи D зависит от высоты установки приёмо-передающей антенны на судне-носителе и на буе-ретрансляторе , и согласно [5], определяется соотношением высот этих антенн:
Для экспериментальной проверки дальности передачи сигнала по каналу связи, были проведены натурные испытания на полигоне Ладожского озера. Один радиомодем (РМ1) Guardian-100 и с УКВ-антенной, поднятой на высоту h1 = 5 м, и ноутбуком был установлен на борту катера, стоящего на якоре. Буй-ретранслятор с установленным внутри него вторым радиомодемом Guardian-100 и УКВ-антенной (РМ2), опускался с борта второго катера на поверхность воды. Высота антенны на буе-ретрансляторе составляла h1 = 0,5 м. При этом второй катер последовательно отходил от первого и совершал остановки через каждые 500 м, во время которых производились сеансы связи с опущенного в воду буя-ретранслятора. Волнение воды составляло ~0,5 балла.
Номинальная дальность канала связи при таких значениях h1 и h2 составит D = 10.5 км.
При приёме сигналов производилась оценка их целостности и запись специализированным программным обеспечением количества «целых» и «битых» сигналов.
Связь осуществлялась в симплексном режиме сначала в одну сторону (от РМ2 к РМ1), затем в другую (от РМ1 к РМ2). Результаты испытаний в виде процентного соотношения количества «целых» принятых сигналов от количества отправленных, приведены на Рис. 4.
Результаты натурных испытаний радиоканала
Как видно из рисунка, экспериментальная дальность связи, при которой количество «целых» принятых сигналов было более 50%, оказалась даже немного выше расчётной.
4. Перспективы развития телеуправления по комбинированному каналу связи
Существенное расширение возможностей существующей системы удалённого управления ТНПА может быть достигнуто за счёт применения более современных сетевых протоколов и интерфейсов. В качестве наиболее перспективных рассматриваются протокол IP и интерфейс Ethernet. Их использование позволит организовать не только надёжное одновременное управление группой аппаратов в расширенной зоне ведения поиска, но и обеспечить непрерывный контроль технического состояния электронного оборудования ТНПА с возможностью его удалённой подстройки.
Вариант организации одновременного управления работой группы ТНПА с использованием радиоканала представлен на Рис. 5.
Вариант организации одновременного управления работой группы ТНПА с использованием технологической радиосети
Реализация такого варианта применения ТНПА повышает требования к обеспечивающей их работу технологической радиосети обмена данными. В этом случае предполагается переход к использованию радиомодемов радиотехнической платформы Viper-SC+, имеющих более высокую скорость обмена данными и поддерживающими работу по IP-протоколу.
Радиомодем Viper-SC+
Данный радиомодем может работать как в диапазоне ОВЧ (136-174 МГц), так и в диапазонах УВЧ (406-512 МГц) и 900 МГц. Он имеет симплексный и полудуплексный режимы работы, обеспечивая пакетную передачу данных на скорости до 256 кбит/с [6].
Следует отметить, что радиомодемы Guardian и Viper-SC+ имеют унифицированный корпус и одинаковую схему крепления, поэтому их установка внутрь буя-ретранслятора не потребует доработки его конструкции.
Радиосеть может быть реализована либо с использованием только радиомодемов Viper-SC+, либо с установкой на судне-носителе профессиональной базовой станции Viper-SC+ base station [7]. В последнем случае можно повысить надёжность работы радиосети за счёт использования встроенной функции автоматического выбора скорости обмена данными в зависимости от уровня мощности принимаемого сигнала. По мере удаления от судна-носителя радиосигнал будет терять свою мощность. В радиосети на радиомодемах Viper-SC+ для поддержания связи на увеличенную дальность придётся в ручном режиме подбирать оптимальную скорость обмена данными. Базовая станция будет выполнять эту функцию автоматически, поддерживая надёжный обмен данными с изменением дальности до ТНПА.
Технические характеристики радиоканала позволяют эффективно управлять аппаратом при решении широкого спектра оперативных задач. Среди них поиск и инспекция стационарных подводных потенциально опасных объектов, освещение подводной обстановки, включая контроль подвижных подводных объектов за счёт использования быстро устанавливаемых/сворачиваемых гидроакустических решёток, связь с которыми может поддерживаться также по каналам узкополосной технологической радиосети обмена данными УКВ диапазона.
Более высокая пропускная способность технологической радиосети на радиомодемах Viper-SC+ позволяет установить на борту ТНПА и успешно использовать дополнительные средства обнаружения, включая видеокамеры. Использование более высокой скорости обмена данными, необходимой для передачи видеосигнала, будет сопровождаться сокращением дальности работы, но она всё равно будет в несколько раз выше, чем при применении WiFi или альтернативного гидроакустического канала связи.
Следует отметить, что описанный в настоящей статье способ обмена данными может эффективно использоваться и для связи с автономными НПА.
Заключение
1. Связь между судном-носителем и телеуправляемым необитаемым подводным аппаратом может быть организована с помощью современных узкополосных радиомодемов, работающих в диапазоне ультракоротких волн. Такой вариант позволяет увеличить дальность работы и расширить рабочую зону ТНПА с существующих 1,2 км до 12 км, что подтверждается результатами натурных испытаний.
2. Использование узкополосной технологической радиосети обмена данными УКВ диапазона позволяет существенно расширить возможности современных судов-носителей за счёт обеспечения управления одновременной работой нескольких ТНПА, действующих в одной или различных оперативных зонах.
3. Использование предложенных вариантов организации управления подводными аппаратами позволяет повысить эффективность операций с использованием ТНПА и существенно снизить финансовые затраты на их проведение за счёт сокращения необходимого наряда судов-носителей и значительного расширения зоны, выполнение задач в которой производится одним судном. При этом может быть многократно сокращены сроки выполнения задач оперативного предназначения.
Литература
1. Костин, М.Ю. Новый подход к телеуправлению необитаемыми подводными аппаратами / М.Ю. Костин, М.М. Шилин. — Текст: непосредственный // Неделя науки СПбГМТУ-2020: сборник докладов Всероссийского фестиваля науки «Nauka 0+»: в 2 т. — Т.1. — СПб.: Изд-во СПбГМТУ, 2020. — с.511-517.
2. Каталог подводных роботов // Robotrends: [сайт] — 2022. — URL: http:robotrends.ru/robopedia/katalog-podvodnyh-robotov (дата обращения 27.07.2022).
3. Guardian (Гардиан) — высокоскоростной радиомодем // Dataradio: [сайт]. — 2022. — URL: http:dataradio.ru/radiomodem/dataradio/calamp_guardian.htm (дата обращения 27.07.2022). й
4. Технический бюллетень №23 «Технологическая радиосеть обеспечения применения телеуправляемых необитаемых подводных аппаратов» // Технический бюллетень «Узкополосные технологические радиосети управления и сбора данных УКВ-диапазона» — ООО «НЦПР» — 2022.
5. Долуханов М. П. Распространение радиоволн. Учебник для вузов / М.П. Долуханов. — М.: Связь, 1972. — 336 с.
6. Радиомодем Viper-SC+ // Flexlab: [сайт]. — 2022. — URL: https:flexlab.ru/product/supply/platform-viper/radiomodem-viper-sc (дата обращения 27.07.2022).
7. Базовая станция Viper SC+ base station// Flexlab: [сайт]. — 2022. — URL: https:flexlab.ru/product/supply/platform-viper/base-station-viper-sc-base-station (дата обращения 27.07.2022).