В настоящем техническом бюллетене представлена краткая информация об использовании радиомодемов диапазона ультракоротких волн (УКВ) для обеспечения функционирования роботов1, предназначенных для решения широкого круга задач на земле, под землей, на воде, под водой, в воздухе и космосе. Материал предназначен для технических специалистов, занятых созданием и эксплуатацией робототехнических систем различного назначения.
3. Наземные и подземные робототехнические комплексы
Первые радиосети управления роботами были созданы для наземных подвижных комплексов, как предъявляющих наименее сложные требования в части организации управления и реализации собственно радиосети.
Одной из первых отработку элементов будущих наземных робототехнических систем в 1994 году выполнила канадская компания Robotech Industries, создав радиоуправляемый трактор. Данное изделие оснащалось различным навесным оборудованием: инструментами для погрузки и разгрузки, бульдозерным ковшом, шнековым буром, устройствами захвата и подметания. Кроме того, была предусмотрена возможность применения специального инструмента − механического манипулятора для работы с бочками, а также средств пожаротушения сухим или пенным огнетушителем. Получившее в результате модернизации название HazHandler изделие предназначалось для решения широкого круга задач, включая работу в опасных для жизни человека зонах с целью расчистки завалов, в том числе, в шахтах и тоннелях, сбора и транспортировки опасных грузов, включая радиационно-, химически- и взрывоопасные, выполнения других работ с удаленным управлением по радиоканалу.
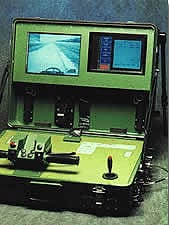
В основу разработки был положен серийно выпускавшийся многоцелевой малогабаритный колесный погрузчик Bobcat 7532, на котором ручное управление заменили на электрогидравлическое, дополнительно установив видеокамеру. Специалисты компании разработали пульт дистанционного управления с джойстиком. Для удаленного управления использовалось специальное программное обеспечение, созданное на основе промышленной SCADA системы. Все модули управления и телеметрии подключались к одному радиоканалу, обмен данными производился с помощью радиомодемов RNet9600, работавших в режиме реального времени на скорости 9,6 кбит/с.
Радиомодем выпускался в двух вариантах — стандартном и уменьшенном. Технические характеристики радиомодема RNet9600 представлены в Таблице 5.
Технические характеристики радиомодема RNet9600.
| Общие характеристики | Радиомодем RNet |
|---|---|
 |
|
| Диапазон частот, МГц | 132-174, 406-430, 450-470 |
| Шаг сетки частот, кГц | 25 |
| Потребляемый ток: | |
| - передача при 13,3 В, мА | 1500 (макс.) |
| - приём при 13,3 В, мА | 35 |
| Рабочее напряжение, В | |
| - встроенный регулятор, выходная мощность 2/4 Вт | 10–17/14-20, постоянный ток |
| - внешний регулятор, выходная мощность 2/4 Вт | 6–9/9-13, постоянный ток |
| Рабочая температура, °C | от -30 до 60 |
| Влажность, % | 96 (при температуре 40°C без образования конденсата) |
| Габаритные размеры, см | 8,38 (Ш) х 6,86 (Г) x 3,86 (В), стандартный 8,38 (Ш) х 6,35 (Г) x 2,54 (В), уменьшенный |
| Масса (в упаковке), кг | 0,39, стандартный 0,25, уменьшенный |
| Тип излучения | 11K0F3E, 16K0FDE |
| Рабочий режим | симплекс, полудуплекс (дуплекс при использовании двух радиомодемов) |
| Приемник | |
| Чувствительность (соотношение сигнал/шум 12 дБ), мВ | 0,40 |
| Стабильность частоты, ppm | 1,5 (2,5 для УВЧ) |
| Избирательность, дБ | 60 |
| Чувствительность, дБ | -116 для соотношения сигнал/шум 12 дБ |
| Избирательность, дБ | 70 @ 25 кГц, 60 @ 12,5 кГц |
| Передатчик | |
| Выходная мощность при напряжении 13,6 В, Вт | настраиваемая 2 или 4 |
| Потребляемый ток, мА | |
| - номинальный | 900 (2 Вт), 1150 (4 Вт) |
| - максимальный | 1250 (2 Вт), 1550 (4 Вт) |
| Импеданс, Ом | 50 |
| Цикл работы на передачу, % | 50% @ 4 Вт, 5 с макс. время передачи |
| Время атаки передатчика, мс | <7 |
| Интерфейс | RS-232 (DB9) |
| Антенна | BNC (мама) |
| Модем | |
| Скорость, кбит/с | 1,2; 2,4; 4,8; 9,6 (настраивается переключателем) |
| Индикация | Питание, приём/передача |
| Вид модуляции | MSK (1,2 или 2,4 кбит/с); DGMSK (4,8 или 9,600 кбит/с) |
| Задержка RTC/CTS, мс | 30 (9600 кбит/c), 40 (4800 кбит/c), 50 (1200 кбит/c), |
В настоящее время наземные роботы получили достаточно широкое применение в военных и гражданских приложениях. Так в США выполнена разработка мобильного робототехнического комплекса MDARS (Mobile Detection Assessment Response Systems) двойного назначения. Данный комплекс применяется в системах обеспечения безопасности объектов Министерства обороны и Национальной администрацией по ядерной безопасности США. Технические характеристики изделия представлены в Таблице 6.
Технические характеристики комплекса MDARS3.
| Общие характеристики | Комплекс MDARS и пульт управления |
|---|---|
  |
|
| Масса, кг | 1420 |
| Количество колес (в том числе, ведущих), шт. | 4 (4) |
| Длина х ширина х высота, мм | 2490 х 1590 х 1170 |
| Грузоподъемность, кг | 136 |
| Максимальная скорость передвижения, км/ч | 35 |
| Расстояние дистанционного управления, км | до 10 |
Обращает на себя внимание дальность дистанционного управления, обеспечиваемая средствами радиосети обмена данными. Такая дальность позволяет применять комплекс практически на всех объектах вышеуказанных ведомств, включая ядерный полигон в штате Невада, имеющий площадь около 3500 км2 и протяженность охраняемого внешнего периметра более 270 км.
Аналогичные разработки проводятся и в Российской Федерации. Примером одной из таких является созданная АО «ВНИИ «Вега» (www.vniivega.ru) система управления робототехническими комплексами с использованием искусственного интеллекта и виртуальной реальности, которая включает в себя пульт управления, датчики, видеокамеры, лидар, вычислительный комплекс и специальное навесное оборудование, беспроводный канал управления и канала передачи данных.
Работа данной системы управления обеспечивается технологической радиосетью, работающей в диапазоне СВЧ и обеспечивающей скорость обмена данными до 24 Мбит/с. Возникающие в связи с этим ограничения по дальности связи компенсируются за счет использования промежуточного ретранслятора, а при групповом применении роботов — формированием самоорганизующейся ячеистой радиосети типа mesh4.
Значительный интерес представляет российская мобильная робототехническая платформа, созданная российской компанией «СМП Роботикс» (www.smprobotics.ru). Платформа включает в себя несколько типов автономных подвижных роботов, управление которыми производится по каналам технологической радиосети обмена данными УКВ диапазона.

Автономный наземный подвижный робот ООО «СМП Роботикс».
Описание данной технологической радиосети будет представлено в одном из следующих выпусков Технического бюллетеня ООО «НЦПР».
Первая из известных автору успешных попыток использования технологической радиосети обмена данными УКВ диапазона для управления и мониторинга работы подземного мобильного робототехнического комплекса, была осуществлена на одном из золотых рудников в провинции Онтарио (Канада) на глубине более 1500 метров ещё в конце прошлого века. Радиосеть обеспечивала обмен данными между пунктом управления и 30-тонными локомотивами, автономно транспортировавшими золотоносную руду по 450 метровому тоннелю к подземной дробилке. С целью повышения надёжности работы был использован радиоизлучающий кабель, установленный вдоль тоннеля.
На локомотивах использовалась система управления, созданная на базе программируемых логических контроллеров (ПЛК) Square-D разработки компании Schneider Electric (www.se.com/ru), позволявшая контролировать функции разгона, торможения и торможения с контролем температуры подшипников и тормозов. Основные опасения разработчиков в части надежной работы радиосети были связаны со способностью радиооборудования работать глубоко под землей, времени отклика системы пакетной радиосвязи (задержек при обмене данными) и помех, от электрической дуги, возникающей в контактной сети локомотива при движении.
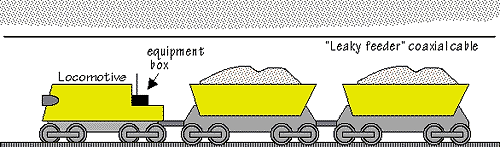
Общий принцип работы подземной радиосети золотого рудника в Канаде (материалы из архива канадской компании Dataradio).
В связи с этим для создания радиосети был использован пакетирующий радиомодем APR (Asynchronous Packet Radiomodem), технические характеристики которого представлены в Таблице 7.
Технические характеристики радиомодема APR.
| Общие характеристики | Радиомодем APR |
|---|---|
 |
|
| Диапазон частот, МГц | 136-174, 450-470 |
| Шаг сетки частот, кГц | 25 |
| Рабочее напряжение, В | 110/220 (переменный) или 12 (постоянный) |
| Рабочая температура, °C | от -30 до 60 |
| Влажность, % | 96 (при температуре 40°C без образования конденсата) |
| Рабочий режим | симплекс, полудуплекс (дуплекс при использовании двух радиомодемов), может использоваться для ретрансляции |
| Приемник | |
| Чувствительность (соотношение сигнал/шум 12 дБ), мВ | 0,40 |
| Стабильность частоты, ppm | ±5 |
| Избирательность, дБ | 60 |
| Интермодуляция, дБ | 60 |
| Передатчик | |
| Выходная мощность, Вт | 2 |
| Импеданс, Ом | 50 |
| Цикл работы на передачу, % | 100 |
| Стабильность частоты, ppm | ±5,0 |
| Интерфейс | 1, 3 или 5 RS-232 (DB9). До четырех пятипортовых устройств могут быть объединены в стек, чтобы получить до двадцати портов, подключенных к одному радиомодулю. |
| Антенна | BNC (мама) |
| Модем | |
| Скорость, кбит/с | 2,4; 4,8; 9,6 |
| Индикация | Питание, приём/передача |
| Вид модуляции | DGMSK |
| Протокол обмена данными | CARMA (протокол множественного радиодоступа для предотвращения столкновений) с автоматическим обнаружением и коррекцией ошибок |
С целью исключения влияния помех от электрического тягового агрегата питание радиомодема и ПЛК на локомотиве было организовано от дополнительно установленных бортовых аккумуляторов.
Чтобы справиться с задержками, возникающими в любой пакетной радиосети, был использован преобразователь протоколов Square-D CRM-560 — модуль, специально разработанный для управления удаленным интерфейсом через системы с задержкой, подключенный через объединительную плату ПЛК Square-D. В первоначальной версии радиосеть работала на скорости 2400 бит/с из-за ограничений контроллера, но позже скорость обмена данными была увеличена до 9600 бит/с.
Время отклика системы было оптимизировано за счет организации работы в широковещательном режиме, который эффективно отключает адресацию, и за счет отключения функции подтверждения APR. Адресация и подтверждения являются функциями протокола опроса ПЛК, поэтому данные функции в радиомодеме APR были отключены. В конечном итоге радиосеть продемонстрировала время отклика менее секунды, что оказалось более чем достаточным для надежной работы системы.
Выбор бортового антенно-фидерного устройства для технологической радиосети обмена данными, обеспечивающей функционирование подвижного робототехнического комплекса, производится исходя из требований конкретного проекта и представляется достаточно обширным. Данные о некоторых видах используемых на борту подвижных средств антенных устройств представлены в Таблице 8.
Виды антенн УКВ-диапазона, применяемых на борту наземных (подземных) подвижных роботов.
| Общие характеристики |  |
 |
 |
|---|---|---|---|
| Рабочий диапазон, МГц | 375-480 | 144/430 | 151,7-156 |
| Высота, мм | 760 | 550 | 371 |
| Размер основания, мм | 120-170 | 120-170 | 185x110 |
| Масса, г | 160 | 232 | 1600 |
Принципы построения технологических радиосетей обмена данными для подземных роботизированных приложений за многие годы практической эксплуатации таких радиосетей остались без существенных изменений. В этой связи представляет интерес проект Автоматизированной системы диспетчеризации транспортного управления кировского филиала АО «Апатит» ПАО «ФосАгро», предусматривающий использование технологической радиосети на современных узкополосных радиомодемах УКВ диапазона в интересах обеспечения подземных и наземных железнодорожных перевозок.


Наземная часть железнодорожной сети кировского и подземная выработка филиала АО «Апатит» (www.phosagro.ru/press/photos/enterprises/kirovskiy-filial-ao-quotapatitquot)
Проект разработан специалистами АО «Научно-исследовательский и проектно-конструкторский институт информатизации, автоматизации и связи на железнодорожном транспорте» (НИИАС, www.vniias.ru) и предусматривает создание радиосети, обеспечивающей повседневную работу около 50 локомотивов на железнодорожной сети, проложенной на поверхности и в тоннелях рудника. Технологическую радиосеть планируется построить на оборудовании радиотехнической платформы Viper-SC+, технические характеристики которого представлены в Таблице 9.
Технические характеристики оборудования радиотехнической платформы Viper-SC+.
| Общие характеристики | Базовая станция Viper-SC+ base station | Радиомодем Viper-SC+ |
|---|---|---|
 |
 |
|
| Диапазон частот, МГц | 136–174; 215–240; 406–470; 450–512 | |
| Шаг сетки частот, кГц (настраивается программно) | 50; 25; 12,5; 6,25 | |
| Тип излучения | 3K30F1D; 11K2F1D; 16K5F1D; 17K8F1D; 33K0F1D; 52K7F1D | |
| Номинальная задержка при холодном старте, с | 60 | 35 |
| Рабочее напряжение, В | 10–30 (постоянный ток) | |
| Рабочая температура, град. C | от-40 до +70 | |
| Температура хранения, град. C | от-45 до +85, без образования конденсата | |
| Влажность, % | 5–95, без образования конденсата | |
| Габаритные размеры, см | 41 (Ш) х 12 (Г) x 29 (В) | 13,97 (Ш) х 10,80 (Г) x 5,40 (В) |
| Масса (в упаковке), кг | 5,2 | 1,1 |
| Рабочий режим | симплекс/полудуплекс | |
| Передатчик | ||
| Полоса рабочих частот, МГц | 38 | |
| Выходная мощность при напряжении 13,6 В, Вт | 1–10 | |
| Время атаки, мс | <1 | |
| Время переключения между каналами, мс | <15 | |
| Импеданс, Ом | 50 | |
| Цикл работы на передачу, % | 100 | |
| Интерфейсы | 2 x RS-232 (DE-9F), 2 х 10Base-T RJ-45 |
2 x RS-232 (DE-9F), 10Base-T RJ-45 |
| Антенна | N-типа (мама) | TNC (мама) |
| Приемник | ||
| Чувствительность (вероятность ошибки 1х10-6): | ||
| - 25 кГц, дБм (при скорости обмена данными кбит/с) | -114 (16); -106 (32); -100 (48); -92 (64) | |
| Подавление помех по соседнем каналу, дБ | 70 | |
| Интермодуляция, дБ | >75 | |
| Избирательность, дБ | >70 | |
| Время переключения с приёма на передачу, мс | <2 | |
| Время переключения между каналами, мс | <15 | |
| Модем | ||
| Скорость, кбит/с | 4; 8; 12; 16; 24; 32; 48; 64 | |
| Индикация | Питание, состояние, подключение к ЛВС, работа ЛВС, приём/передача | |
| Вид модуляции | 2FSK, 4 FSK, 8FSK, 16FSK | |
| Адресация | IP | |
Надёжность радиосвязи под землей должна обеспечиваться применением радиоизлучающего кабеля, в то время как на поверхности функционирование радиосети будет организовано через 13 базовых станций, которые планируется развернуть вдоль железнодорожных путей. Возможности спроектированной технологической радиосети позволяют эффективно организовать и развивать перевозки с переходом в перспективе к автоведению локомотивов без участия машиниста и роботизации процессов погрузки-выгрузки.
(Продолжение следует)