Техническое извещение 16
В настоящем техническом извещении представлена краткая информация о практическом создании и использовании узкополосной технологической радиосети обмена данными УКВ диапазона в интересах организации командно-управляющей радиосети для мобильных (подвижных) радиотехнических комплексов1 различного назначения на примере изделий российской компании «СМП роботикс» (г. Зеленоград). В статье использованы данные, полученные в результате натурных испытаний технологической радиосети для удаленного управления автономным подвижным колесным роботом, проведенных на заводском полигоне компании летом 2023 года. Материал предназначен для специалистов, занимающихся созданием интегрированных информационно-управляющих систем в промышленности и на транспорте, предусматривающих применение в их составе наземных подвижных роботов.
1. Общая информация
В ходе испытаний была проверена и оценена возможность применения узкополосных радиомодемов УКВ диапазона в интересах организации командно-управляющей радиосети для удаленного управления одним или группой автономных подвижных роботов ООО «СМП роботикс» различного назначения.
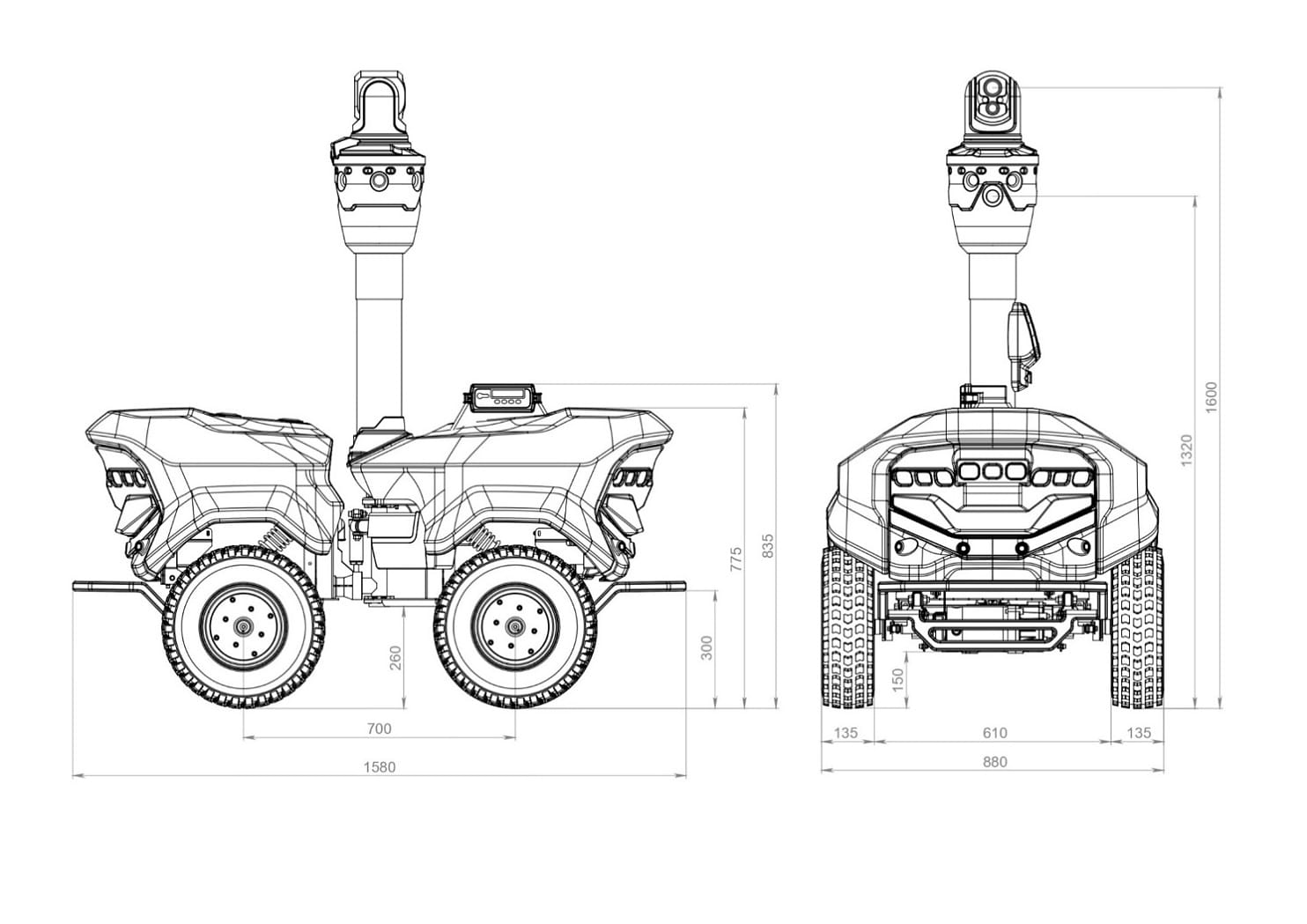
Автономный наземный подвижный робот ООО «СМП Роботикс».
Испытания были проведены в статическом состоянии и при движении по пересеченной местности с использованием робота «Инспектор», входящего в состав платформы Т7.
Основные виды информации, передаваемой в командно-управляющей радиосети между оператором/пунктом управления (ПУ) и автономным подвижным наземным роботом, включают в себя:
-
сигналы управления движением «ПУ-борт»);
-
доклады о действиях робота, включая навигационную информацию («борт-ПУ»);
-
сигналы управления полезной нагрузкой («ПУ-борт»);
-
доклады об использовании полезной нагрузки («борт-ПУ»);
-
запросы о техническом состоянии подсистем и агрегатов робота («ПУ-борт»);
-
доклады о техническом состоянии подсистем и агрегатов робота («борт-ПУ»);
-
запросы о техническом состоянии полезной нагрузки («ПУ-борт»)
-
доклады о техническом состоянии полезной нагрузки («борт-ПУ»).
Краткая информация о роботах, входящих в состав вышеуказанной платформы, представлена в Таблице 1.
-
Перечень и назначение автономных подвижных наземных роботов платформы Т7 ООО «СМП Роботикс».
| Т7 «Инспектор» | Т7 «Атмосфера» |
|---|---|
 |
 |
| На поворотной платформе робота установлены тепловизионная и обычная камеры, соосно с ними закреплен дистанционный лазерный детектор метана. Робот автоматически наводит камеры на объект с целью обнаружения утечек. Изображение с камер и показания газового детектора передаются оператору по беспроводным каналам связи и сохраняются на борту. При отсутствии возможности передачи данных в процессе движения они скачиваются на сервер информационной системы во время зарядки робота по широкополосному беспроводному каналу связи IEEE 802.11 WiFi. Реализованный алгоритм работы предполагает, что робот в автоматическом режиме перемещается по заданному маршруту, объезжая препятствия, а по завершению выполнения задачи встает на автоматическую зарядку аккумуляторных батарей. Оператор может оперативно просматривать поступающие от робота мультимедийные данные и вносить изменения в его действия. |
Станция контроля качества воздуха, установленная на борту мобильного робота, позволяет контролировать состав атмосферы на заданной территории по маршруту движения робота и передавать ее оператору по беспроводному каналу обмена данными. Автономные мобильные роботы, оснащенные станциями мониторинга воздуха, позволяют в оперативном режиме и с высокой детализацией получать достоверную информацию об антропогенных выбросах парниковых газов и измерять концентрации следующих веществ: кислород, озон, оксид углерода (угарный газ), диоксид углерода (углекислый газ), метан, формальдегид, оксид азота, диоксид азота, аммиак, диоксид серы, сероводород, фосфин, хлор, цианистый водород. |
-
Перечень и назначение автономных подвижных наземных роботов платформы Т7. (продолжение)
| Т7 «Курьер» | Т7 «Патруль» |
|---|---|
 |
 |
|
Робот предназначен для транспортировки небольших грузов, включая жидкости (например, емкости с пробами) на закрытой территории. Он обладает проходимостью, достаточной для надежного движения по заснеженным дорогам и слабо пересеченной местности. Энерговооруженность робота позволяет ему преодолевать расстояния до 15 км при температуре воздуха до ‒40°С и перевозить груз массой до 30 кг. Отличительной особенностью робота является простота управления. Открытие транспортного отсека и назначение места доставки производятся с установленной на борту клавиатуры. |
На мачте мобильного робота установлена управляемая камера высокого разрешения. Благодаря мощному увеличению оптической системы, камера позволяет рассматривать удаленные объекты на расстоянии до 500 метров. Изображение с камеры транслируется по беспроводным каналам связи и сохраняются на борту. Робот дополнительно оснащен рупорным громкоговорителем для звукового оповещения персонала и может перемещаться как в автоматическом режиме, так и под управлением оператора. |
1. Испытания на борту робота Т7 «Инспектор»
Испытания были разбиты на два этапа — лабораторные, которые были проведены в закрытом помещении (цеху) и натурные, организованные и проведенные на открытом полигоне.
В рамках испытаний на борту робота Т7 «Инспектор» был установлен и подключен к бортовому вычислительному комплексу узкополосный радиомодем Guardian-400 производства американской компании NextGen RF Design (www.nextgenrf.com) в диапазоне 406-470 МГц. Данный выбор был обусловлен необходимостью доработки технического решения для партии роботов, поставляемых компанией «СМП роботикс» в США. Следует отметить, что данное устройство представляет собой «прозрачное»2 устройство, работающее по последовательному интерфейсу, не позволяющее производить удаленную настройку радиосети, в связи с чем все настройки были выполнены заранее. Удаленная настройка полезной нагрузки программой испытаний не предусматривалась и на практике не производилась. Общий вид радиомодема Guardian представлен на Рис. 1 и 2.

-
Общий вид радиомодема Guardian.


-
Радиомодем Guardian-400 на борту робота Т7 «Инспектор» в ходе лабораторного этапа испытаний.
Основные технические характеристики радиомодема Guardian представлены в Таблице 2.
-
Основные технические характеристики радиомодема Guardian.
| Общие характеристики | Радиомодем Guardian | ||
|---|---|---|---|
 |
|||
| ОВЧ | УВЧ | 900 МГц | |
| Диапазон частот, МГц | 136–174 | 406–470, 450–512 | 928-960 |
| Шаг сетки частот, кГц | 25 или 12,5 (настраивается программно) | ||
| Тип излучения | 9K55F1D, 9K35F1D, 11K6F1D, 14K6F1D, 16K4F1D | ||
| Потребляемый ток: | |||
| - приём, мА | 360 (10 В); 200 (20 В); 150 (30 В) | ||
| - передача 40 дБм (10 Вт), А | 4,6 (10 В); 2,04 (20 В); 1,37 (30 В) | ||
| - передача 30 дБм (1 Вт), А | 1,2–3,6 (10 В); 0,6–1,8 (20 В); 0,4–1,2 (30 В) | ||
| Номинальная задержка при холодном старте, с | 20 | ||
| Рабочее напряжение, В | 10–30, постоянный ток | ||
| Рабочая температура, °C | от -30 до 60 | ||
| Температура хранения, °C | от -45 до 85 | ||
| Влажность, % | 5–95 (без образования конденсата) | ||
| Габаритные размеры, см | 13,97 (Ш) х 10,80 (Г) x 5,40 (В) | ||
| Масса (в упаковке), кг | 1,1 | ||
| Рабочий режим | Симплекс, полудуплекс, дуплекс | Симплекс, полудуплекс | |
| Приемник | |||
| Чувствительность (вероятность ошибки 1х10-6), дБм: | |||
| - 25 кГц | -100 (19,2 кбит/с), -107 (9,6 кбит/с), -110 (4,8 кбит/с) | ||
| - 12,5 кГц | -107 (9,6 кбит/с), -110 (4,8 кбит/с) | ||
| Подавление помех по соседнему каналу, дБ | 60/12,5 кГц; 70/25 кГц | ||
| Интермодуляция, дБ | >75 | ||
| Избирательность, дБ | >70/25 кГц; >60/12,5 кГц | ||
| Передатчик | |||
| Полоса пропускания без подстройки, МГц | 38 |
64 (406,1–470) |
32 |
|
62 (450–512) |
|||
| Выходная мощность при напряжении 13,6 В, Вт | 1-10 | 1-8 | |
| Время атаки, мс | <1 | ||
| Время переключения между каналами, мс | <15 | ||
| Импеданс, Ом | 50 | ||
| Цикл работы на передачу, % | 100 | ||
| Стабильность частоты, ppm | 1,0 | ||
| Интерфейсы | RS-232 (DB9) | ||
| Антенна | TNC (мама) – приём/передача, SMA (мама) – приём (для дуплексных моделей) | ||
| Модем | |||
| Скорость, кбит/с | 4,8; 9,6; 19,2 | ||
| Индикация | Питание, состояние, подключение к ЛВС, работа ЛВС, приём/передача | ||
| Вид модуляции | 2FSK | ||
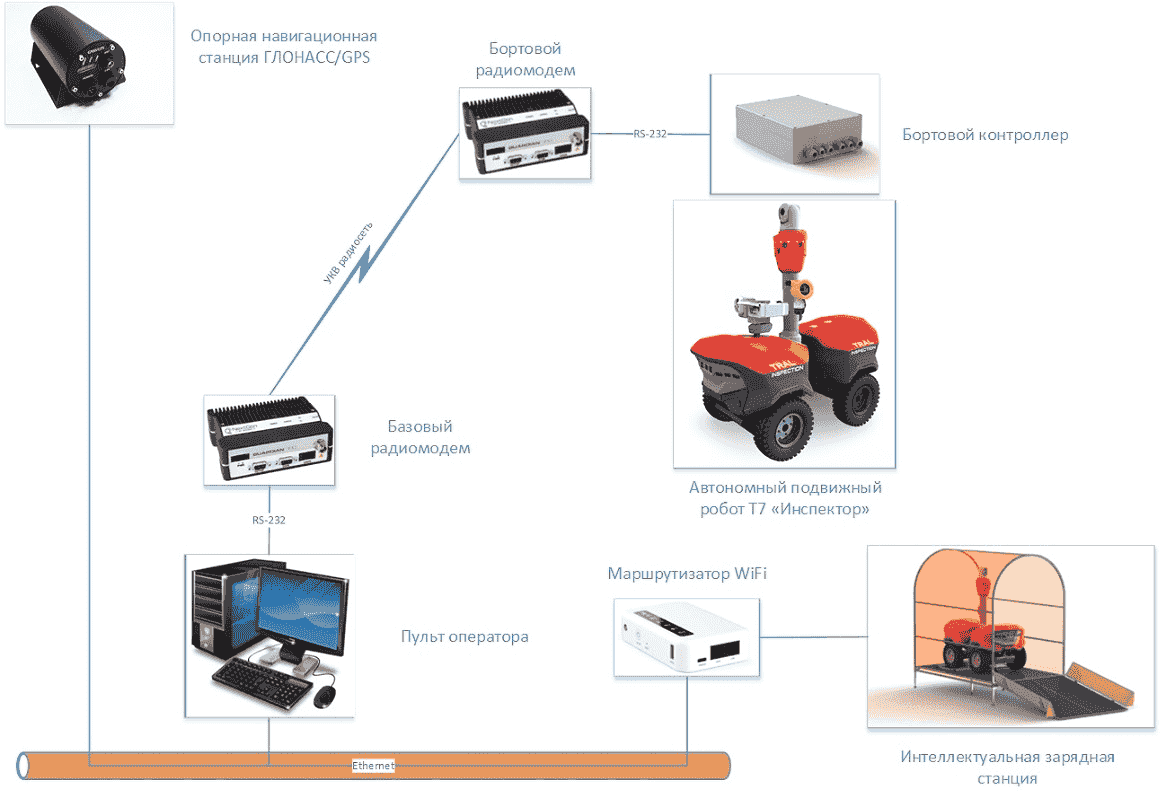
Натурные испытания были проведены с использованием типовой схемы коммутации оборудования с задействованием одного автономного подвижного робота Т7 «Инспектор». Базовый радиомодем Guardian-400 был подключен к пульту управления оператора, имеющего встроенные средства спутниковой навигации и удаленный доступ к опорной навигационной станции ГЛОНАСС/GPS, позволяющий повысить точность навигации робота при движении по маршруту и выполнении служебных операций, включая самостоятельное подключение к зарядной станции с целью подзарядки бортового аккумулятора. Второй радиомодем был установлен на борту робота и подключен к программируемому контроллеру по последовательному интерфейсу. Использование последовательного интерфейса в данном случае позволило максимально сократить задержки при обмене данными по командно-управляющей радиосети и оценить ее пропускную способность в части возможности одновременного обслуживания нескольких роботов. Собранная от бортовой полезной нагрузки тестовая информация передавалась на пульт оператора в процессе подзарядки бортовой аккумуляторной батареи по широкополосному каналу WiFi. Общая схема испытаний представлена на Рис. 2.
-
Типовая схема коммутации оборудования для проведения натурных испытаний узкополосной технологической радиосети управления и обмена данными автономного подвижного робота Т7 «Инспектор».
Натурные испытания проводились в упрощенных условиях на слабо пересеченной местности. Основной задачей была проверка работы системы управления роботом и контроля его местоположения. Задача определения максимальной дальности связи в процессе испытаний не ставилась, поэтому базовый радиомодем работал с уровня земли с подъемом приемопередающей антенны на 1,5 метра, что обеспечило устойчивую и надежную работу на всем маршруте, наиболее удаленная от базовой станции точка которого находилась на расстоянии более трех километров. В ходе работ была обеспечена надёжная связь с роботом на всех участках маршрута его движения. По радиосети было передано 20 тыс. сообщений, доведение 19976 из которых было подтверждено инструментальными средствами объективного контроля. Задержки в доставке данных оказались более чем приемлемыми и не оказали отрицательного влияния на работу системы управления, пропускная способность радиоканала за счет малого времени доступа оказалась приемлемой при работе даже на пониженных скоростях.
Таким образом, испытания прошли успешно и подтвердили возможность использования технологической радиосети обмена данными в интересах удаленного управления автономными подвижными наземными робототехническими комплексами.