В настоящем техническом бюллетене представлена краткая информация об использовании радиомодемов диапазона ультракоротких волн (УКВ) для обеспечения функционирования роботов1, предназначенных для решения широкого круга задач на земле, под землей, на воде, под водой, в воздухе и космосе. Материал предназначен для технических специалистов, занятых созданием и эксплуатацией робототехнических систем различного назначения.
4. Надводные и подводные робототехнические комплексы
Опыт успешного применения УКВ радиосвязи на море имеет многолетнюю историю. С этой целью выделен специальный диапазон частот 156,0...162,025 МГц, на котором радиообмен происходит с использованием узкополосной частотной модуляции. Весь диапазон разделен на 58 каналов, шаг сетки частот составляет 25 кГц. Разрешенная мощность излучения приемопередатчиков морской УКВ радиосвязи находится в диапазоне от 1 до 25 Вт. Наличие выделенного радиочастотного ресурса и действующие ограничения по выходной мощности оборудования позволяют использовать существующие и перспективные узкополосные радиомодемы для создания морских радиотехнических систем различного назначения.
Надводные робототехнические комплексы представлены, в первую очередь, безэкипажными кораблями и катерами (БЭК). Такие плавсредства применяются на обширных акваториях и требуют непрерывного контроля за их перемещением и текущим местоположением, выполняемой задачей и техническим состоянием как самого плавсредства, так и установленной на нем полезной нагрузки.
Наиболее перспективными областями применения БЭК в гражданских приложениях можно считать следующие:
научно-исследовательские работы, включающие в себя проведение батиметрической съемки, измерения параметров водной и воздушной среды, исследования морской фауны в районах экономической деятельности;
поиск затонувших объектов и контроль состояния подводных потенциально опасных объектов;
участие в операциях по локализации и ликвидации пожаров на судах и при разливе нефтепродуктов. Отсутствие на борту катера личного состава исключает риск его поражения в результате воздействия высокой температуры, возможных взрывов, воздействия углекислого и других токсичных газов, образующихся в процессе горения. Это позволяет БЭК подходить на минимально допустимые расстояния к очагу возгорания и точечно воздействовать на него;
установка боновых заграждений для локализации аварийных разливов нефтепродуктов. Риск возгорания при выполнении таких операций вносит дополнительную сложность. БЭК-бонопостановщики позволят упростить процесс постановки бонов, снизив при этом все существующие риски;
выполнение лоцмейстерских функций и проводка судов методом «ведущий–ведомый» (судно следует за БЭК как за лидером);
спасательные операции по эвакуации людей с терпящего бедствие судна. Безэкипажные спасательные шлюпки закрытого типа позволят самостоятельно определить собственное местонахождение, направление в сторону ближайшего берега, проложить маршрут и рассчитать оптимальные параметры движения с учетом запаса топлива на борту и загрузки шлюпки, а затем достичь берега, двигаясь по проложенному маршруту и избегая столкновений с другими шлюпками и судами;
выполнение функций разъездного катера, предполагающие проведение инспекционных работ и патрулирования, выполнение оперативной работы в качестве служебно-разъездного и спасательного водного транспорта во внутренних акваториях и в прибрежных районах морей;
поиск скоплений рыбы и морепродуктов в интересах рыболовецкого флота. Группа БЭК может самостоятельно обследовать заданные акватории и передавать полученную информацию на промысловые суда;
доставка в район использования морской научной аппаратуры, включая автономные подводные аппараты, и возвращение ее на берег после выполнения поставленной задачи;
очистка акватории портов и стоянок судов от мусора, а также мониторинг состояния водной поверхности на рейде.
В системе управления БЭК применяется программное обеспечение с элементами искусственного интеллекта, позволяющее обеспечить высокую безопасность при судовождении, совместном плавании и маневрировании, а также реакцию на внезапно возникающие внешние возмущения. Такое же программное обеспечение может использоваться для обеспечения надёжности связи за счет автоматической адаптации рабочих параметров радиотехнической аппаратуры к изменяющимся условиям радиоэлектронной обстановки. Искусственный интеллект может непрерывно контролировать реальные условия приёма радиосигналов в каждой точке подвижной радиосети технологической радиосети управления и обмена данными, а также рабочие параметры собственно радиосети и адаптировать их к реальной радиоэлектронной обстановке. Создание такой системы предусмотрено планом разработки отечественной радиотехнической платформы «Гепард».
В этой связи существенный интерес представляет решение для технологической радиосети обмена данными УКВ диапазона, предназначенной для обеспечения управления группой безэкипажных катеров, применяемых в составе разрабатываемой специалистами ФГБОУ ВО «Санкт-Петербургский государственный морской технический университет» (СПбГМТУ, www.smtu.ru) перспективной системы сбора батиметрической информации, данные о которой представлены на Рис. 5.
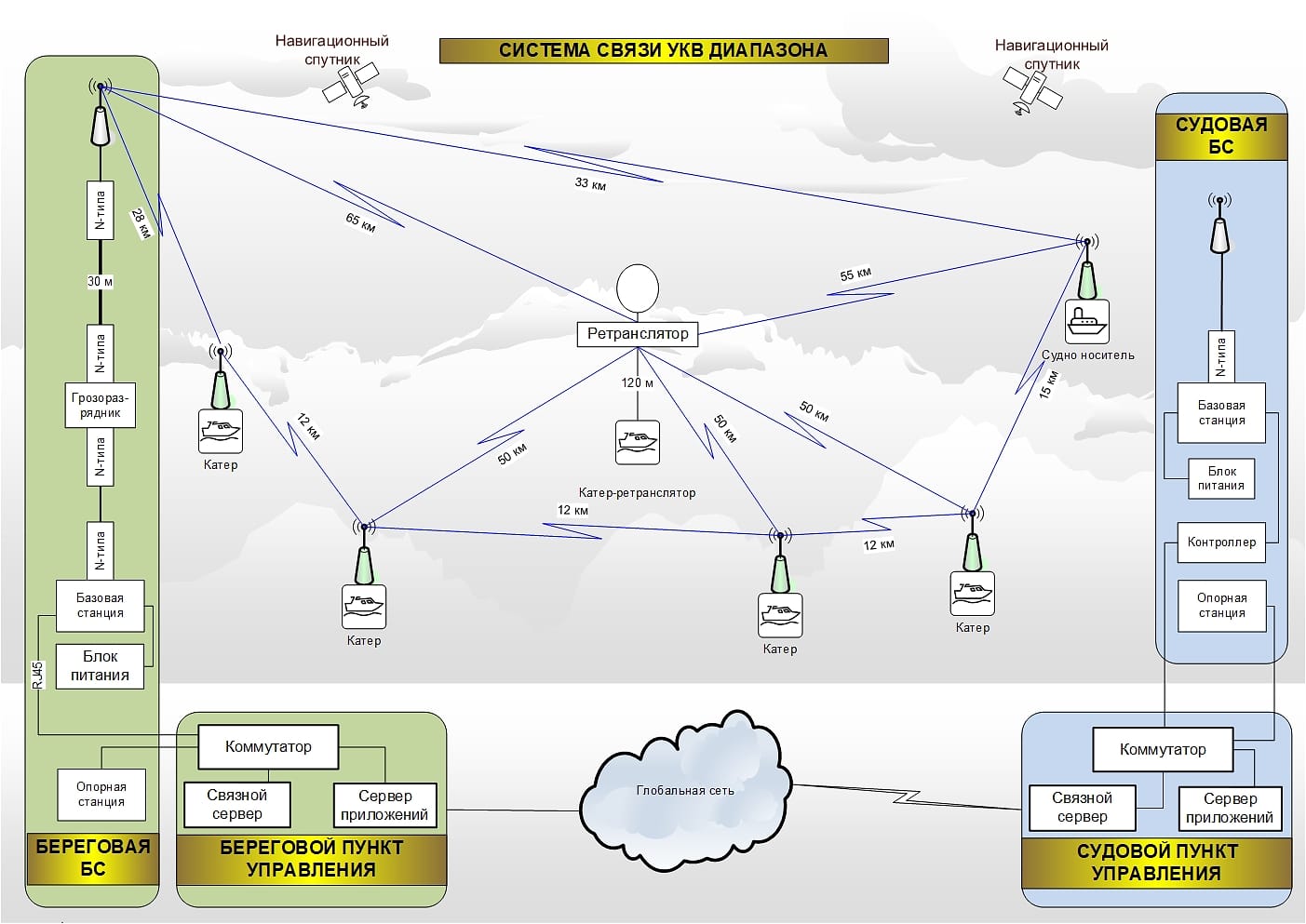
Технологическая радиосеть обмена данными УКВ диапазона для обеспечения управления группой безэкипажных катеров.
Предусматривается развертывание интегрированной радиосети обмена данными по классической схеме, включающей в себя узкополосную радиосеть для организации управления и мониторинга технического состояния, а также широкополосную радиосеть для трансляции батиметрической информации от установленных на БЭК гидролокаторов бокового обзора с разрешением 480p или 1,28 Мбит/с от каждого БЭК в реальном масштабе времени. В настоящей статье рассматривается только командно-управляющая радиосеть, реализуемая на узкополосном оборудовании упомянутой выше американской радиотехнической платформы Viper-SC+ или отечественных узкополосных радиомодемах семейства «Гепард». В настоящее время применение зарубежного оборудования предоставляет ряд существенных преимуществ, однако, конечный вариант для конкретного приложения будет определяться требованиями заказчика и готовностью отечественного оборудования. В связи с этим ниже рассмотрены возможности и особенности радиосети без привязки к конкретному оборудованию, а только с учетом уже готовых к реализации функциональных возможностей радиосети.
Основной технической сложностью в процессе проработки проекта явилось требование обеспечения надежного обмена данными на значительную дальность. В связи с этим разработчиками было принято решение о применении промежуточного ретранслятора, в качестве которого было предложено использовать дополнительный БЭК, оснащенный привязным воздушным шаром, обеспечивающим подъем приемопередающей антенны ретранслятора на заданную высоту. Расчеты показали, что подвес антенны ретранслятора на высоте около 120 метров обеспечит прямую радиовидимость в заданной оперативной зоне и надежную связь между всеми пользователями. Однако, в связи с большими потерями сигнала в радиочастотном кабеле такой длины и невозможностью применения кабелей с низкими потерями, обусловленной их относительно большой массой (что приводит к необходимости увеличения грузоподъемного воздушного шара) и толщиной (в результате которой существенно увеличивается парусность всей конструкции) таких кабелей, было принято решение об установке всего радиотехнического оборудования в гондоле воздушного шара. В этом случае потери сигнала близки к нулевым, а с палубы катера на размещенную в гондоле аппаратуру подается только электропитание по кабель-тросу, который удерживает воздушный шар на заданной высоте. Таким образом, в походном положении воздушный шар находится внутри корпуса катера и поднимается в воздух по прибытии в заданный район. Толщина и длина кабель-троса позволяет использовать для его роспуска, сматывания и хранения доработанную серийно выпускаемую малогабаритную электрическую судовую лебедку, которая должна обеспечивать спасение радиотехнического оборудования и в случае падения шара.
Предполагается, что при большом удалении оперативной зоны БЭК от берега, катера могут доставляться туда судном-носителем, которое должно обеспечивать управление ими при совместном проведении работ. В противном случае координация действий БЭК может производиться непосредственно с берега. При этом возможности применяемой аппаратуры позволяют организовать обмен данными между соседними катерами, что в принципе обеспечивает при заданных параметрах радиосвязи максимальную дальность передачи в направлении «берег — судно-носитель — ретранслятор — катер № 1 — катер № 2 — катер № 3» более 170 км. И эта дальность, естественно, может быть увеличена при увеличении высоты подвеса приемопередающей антенны ретранслятора, которая, правда, повлечет за собой доработку судовой лебедки и, возможно, воздушного шара. Технические возможности как зарубежной, так и отечественной радиотехнической аппаратуры обеспечат обмен данными на большую дальность без дополнительной модернизации, однако, в случае увеличения массогабаритных характеристик полезной нагрузки вместо воздушного шара может быть использован привязной беспилотный летательный аппарат. В качестве платформы для ретранслятора возможно использование также пилотируемого или беспилотного летательного аппарата самолетного или вертолетного типа. В этом случае можно поднять аппаратуру ретранслятора на существенно большую высоту и значительно расширить оперативную зону. Однако, каждое техническое решение и имеет свою стоимость, а для варианта с воздушным шаром она оказывается существенно ниже.
Следует отметить, что в данном случае система управления катера-ретранслятора должна дополнительно обеспечивать оптимизацию работы радиосети обмена данными с учетом, например, ограничения зоны электромагнитной доступности (ЭМД) технологической радиосети и экономии электропитания. Зона ЭМД может корректироваться высотой подвеса приемопередающей антенны катера-ретранслятора. При этом могут изменяться не только ее размеры, но и покрытие, поскольку местоположение БЭК и судна-носителя будет изменяться в результате перемещения, а катера-ретранслятора — возможного дрейфа. Выбор оптимальных размеров и покрытия оперативной зоны может и должен оперативно выполняться программным обеспечением катера-ретранслятора. Точно так же бортовое ПО управления радиосети может определять оптимальные условия для обмена данными в части выходной мощности и скорости обмена данными, принимая во внимание, что при увеличении скорости обмена при прочих равных дальность связи уменьшается, а трансляция на более низкой скорости требует и более низких энергозатрат. Возможности рассматриваемого радиотехнического оборудования позволяют автоматически изменять скорость обмена данными для БЭК, используя различные настройки для катеров, находящихся ближе к центру радиосети и ее внешним границам, обеспечивая экономию потребляемой электроэнергии.
Полученные в результате выполненных работ данные показали, что отработанный вариант технологической радиосети может эффективно применяться в ряде других приложений, связанных с автоматическим судовождением и выполнением различных операций на море. К таковым относятся, например, лоцманское обеспечение с проводкой судов на подходах к морским портам, в пределах акватории морских портов, между морскими портами, в открытом море и на внутренних водных путях, а также транспортировка людей и грузов с использованием безэкипажных катеров в пределах заданной акватории.
Подводные робототехнические комплексы включают в себя устанавливаемые на две или в толще воды стационарные средства, обеспечивающие сбор данных, как правило, в автономном режиме и выполняющие заданные операции (например, всплытие и передачу радиосигнала) по заложенной в них программе при определенных событиях, а также подвижные телеуправляемые (ТНПА) и автономные необитаемые подводные аппараты (АНПА). Использование узкополосной технологической радиосети обмена данными УКВ диапазона для обеспечения эксплуатации ТНПА достаточно подробно описано ранее2.
В случае с всплывающими донными станциями и АНПА характер функциональных задач, возлагаемых на сеть связи, остается практически неизменным и предусматривает передачу навигационной и телеметрической информации, а также, при необходимости, команд управления.
Применение в составе современных донных станций и АНПА аппаратуры узкополосных технологических радиосетей обмена данными УКВ диапазона широкого распространения пока не получило. В первую очередь такие аппараты оснащаются спутниковыми средствами обмена данными. Это обусловлено, прежде всего, районами и условиями их применения. Однако, в последнее время наметилась тенденция к установке на отдельных донных станциях и АНПА средств обмена данными УКВ диапазона. Это связано, преимущественно, с появлением ограничений в применении спутниковых сетей обмена данными и развитием технологий в области связи в целом. Такое техническое решение позволяет расширить возможности ранее разработанных и вновь проектируемых систем, а также повысить надёжность их функционирования.
Так, специалистами ФГБУ «Всероссийский научно-исследовательский институт по проблемам гражданской обороны и чрезвычайных ситуаций МЧС России» (www.vniigochs.ru), ООО «Ситекрим» (www.seatechrim.ru) и ФГБУН «Институт проблем безопасного развития атомной энергетики РАН» (www.ibrae.ac.ru) разработан проект Интегрированной системы мониторинга и контроля радиационного и химического загрязнения арктических морей3, базировавшийся на использовании только каналов спутниковой связи. Включение в состав проекта технологической радиосети обмена данными позволяет существенно расширить гибкость применения системы и снизить затраты, связанные с ее эксплуатацией. Вариант реализации модернизированной системы представлен на Рис. 6.
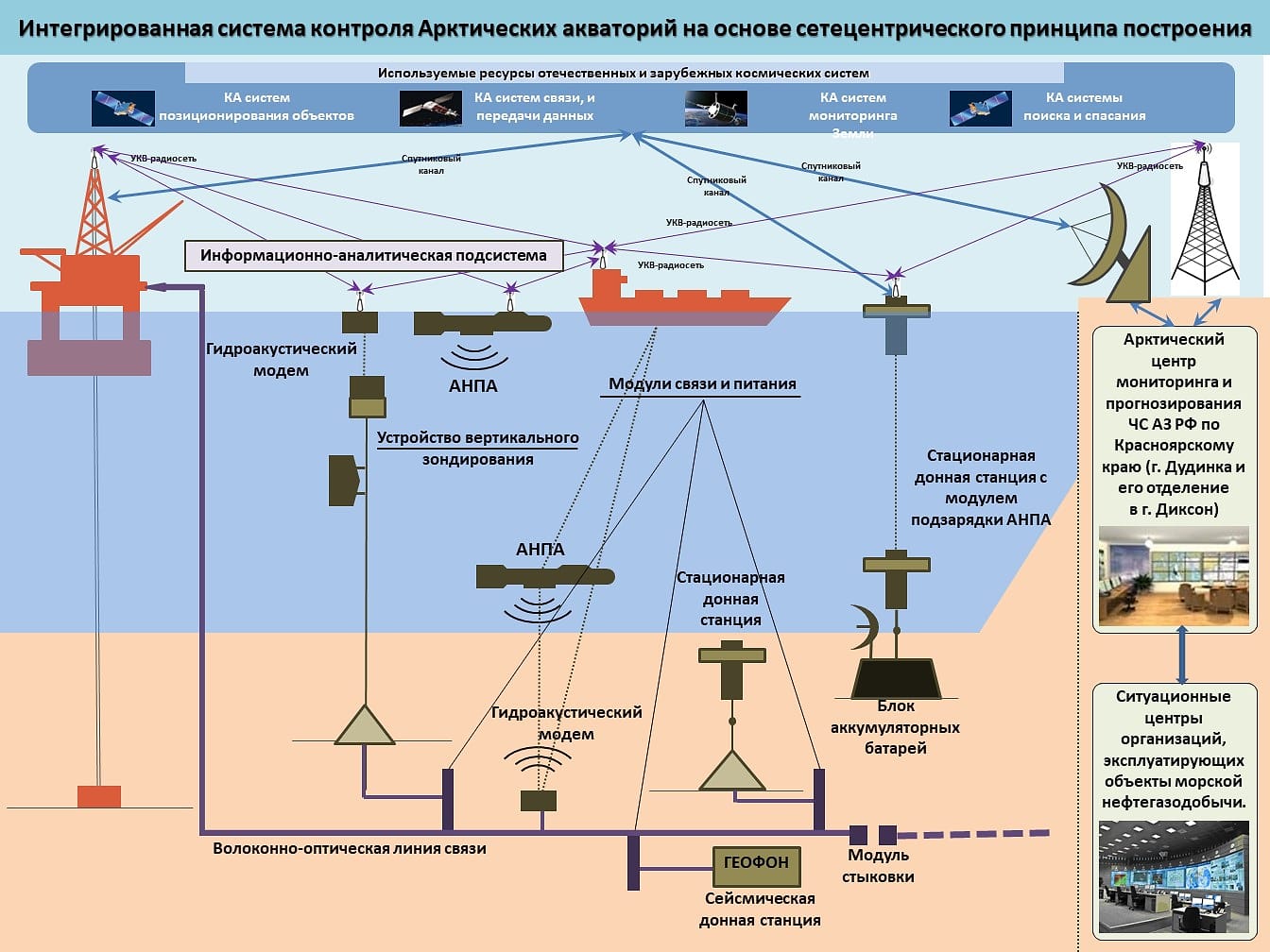
Схема размещения и сопряжения измерительной и связной аппаратуры в Интегрированной системе мониторинга и контроля радиационного и химического загрязнения арктических морей.
В состав основных измерительных модулей системы входят:
автономная донная станция контроля химических параметров и уровня радиоактивности водных масс;
кабельная донная станция контроля химических параметров и уровня радиоактивности водных масс;
автоматизированное профилирующее устройство вертикальной структуры содержания химических примесей водных масс;
сейсмическая донная станция;
подводный аналитический модуль массоспектрометрических и рентгенофлюоресцентных измерений.
Для получения данных о состоянии водных масс в участках контролируемой акватории между стационарными донными измерителями используются автономные необитаемые подводные аппараты (АНПА) c набором датчиков физико-химических параметров воды и с акустическими системами измерения течений, батиметрии и поиска объектов на дне. Функционирование всей вышеперечисленной аппаратуры может быть обеспечено средствами современной узкополосной технологической радиосети обмена данными на базе радиомодемов УКВ диапазона
ВЫВОДЫ:
Независимо от степени автономности робототехнические комплексы воздушного (космического), наземного (подземного) и надводного (подводного) базирования должны оснащаться радиотехническим средствами обмена данными, обеспечивающими связь с пунктами управления данными комплексами с целью обмена текущей оперативной и технической информацией. Для обмена такой информацией наиболее целесообразно использовать узкополосные радиомодемы УКВ диапазона, как наиболее полно удовлетворяющие требованиям обеспечения управления и мониторинга в части дальности связи, надёжности доставки информации и пропускной способности.
Требования к беспроводной сети обмена данными для организации управления робототехническими комплексами воздушного (космического), наземного (подземного) и надводного (подводного) базирования гражданского назначения с функциональной точки зрения являются идентичными и их выполнение может быть обеспечено серийно выпускаемыми радиотехническими средствами для узкополосных технологических радиосетей обмена данными УКВ диапазона.